広報・広聴活動
ジメチルエーテルの燃焼エネルギーで動く 人工筋肉を開発 ― 生体筋肉に迫る瞬発的な応答性を実現 ―
2025年05月26日
概要
中央大学理工学部の奥井 学准教授らの研究グループは、燃焼エネルギーを活用した新しい人工筋肉アクチュエータ「HADEC(High-Response Artificial muscle using Dimethyl Ether Combustion)」を開発しました。
従来の空気圧人工筋肉が抱えていた“応答速度の遅さ”という課題を、可燃性ガス「ジメチルエーテル(DME)」*1)の燃焼によって解決し、瞬時に大きな力を発揮することに成功しました。HADECは、マッキベン型のゴムチューブ構造にDMEと空気の混合気体を充填し、着火によって急激な内部圧力を生じさせることで収縮運動を生じさせる人工筋肉です。この構造により、補助機構(ラッチやブレーキ)を必要とせず、わずか数ミリ秒で力を発生させることが可能です。DMEはクリーンな燃料としても知られており、ススをほとんど出さず、環境負荷も低いという特長があります。
実験では、駆動指令から平均約4ミリ秒で力を発生開始し、約40ミリ秒で最大出力に達するという、従来の空気圧システムでは達成困難だった高応答性が確認されました(図1)。HADECは、内径16 mm、長さ120 mmの試作機において約180 Nの力を発揮し、開発した空気圧回路によって10 Hzまでの安定した繰り返し駆動が可能です(図2)。また、高頻度での繰り返し駆動に際しては冷却措置や耐熱性の高い材料の採用すること、適切なインターバルを設けることで安全な運用が可能であることも実証しました。本研究成果は、ソフトロボットの動力源としてだけでなく、介護支援ロボットや建設現場における打音検査装置など、高速・高出力な動作が求められる幅広い分野への応用が期待されます。
本研究成果は、2025年5月23日(米国東部時間)に国際学術誌 『IEEE Robotics and Automation Letters』のオンライン版に掲載されました。
図1 HADECをアームに適用した際の瞬発動作
図2 HADEC概要
(a) 駆動コンセプト:ジメチルエーテル(DME)は左右のエンドフィット(継手)から供給および排気され吸気側のエンドフィットに取り付けられた点火装置により燃焼させます。
(b) 試作機:点火装置は電極ワイヤを介してタングステン棒に高電圧を送り点火を行います。
(c) 空気回路:排気側にはスピードコントローラを用いて排気側の流量を調整します。
(d) 点火部(電極):スパーク間の距離は2mmです。
【研究内容】
1.背景
近年、柔軟性と安全性を活かして人間に寄り添った動作が可能な「ソフトロボット」が注目を集めており、その中核となるのが「人工筋肉」による駆動技術です。中でも、空気圧を用いたマッキベン型人工筋肉は、生体筋に類似した収縮特性を持ち、軽量で安全性の高い駆動源として広く活用されています。
しかし、空気圧では空気そのものが圧縮性を持つという特性上、応答速度に限界があり、特に生体のような素早く力強い動作を必要とする用途では十分な性能を発揮できないという課題があります。これに対して、これまでの研究では制御手法の改良や、磁気粘性流体などを用いた補助機構の導入により応答速度の向上が試みられてきましたが、構造的な応答遅延の根本的な解消には至っていませんでした。
2.研究内容と成果
本研究では、空気圧人工筋肉の構造はそのままに、内部にDMEと空気の混合気体を充填して点火することで、燃焼に伴う急激な圧力上昇を収縮動作に変換する新たなアクチュエーション手法「HADEC(High-Response Artificial muscle actuator using Dimethyl Ether Combustion)」を提案しました。(図2)。
2-1.燃焼駆動による応答性の実証
実験では、内径16 mm、長さ120 mmのマッキベン型人工筋肉をベースに、給気・排気の端末部に点火装置とセンサ群を備えた専用の試験装置を製作しました(図3)。人工筋肉の内部には、事前にDMEと空気をモル比7%で混合した気体を滞留させ、イグニッションコイルを用いてスパーク着火を行いました。計測では、ロードセルにより収縮力、圧力センサにより内部圧力、レーザ変位計により変位をそれぞれ200 Hzのサンプリングで記録しました。実験条件として、初期内圧を0、10、20、30、40 kPaの5通りに設定し、各条件下で燃焼駆動を3回ずつ実施しています。
その結果、すべての条件において、初期圧力0 kPaの状態からでも平均4ミリ秒以内に力の立ち上がりが始まり、約40ミリ秒でピーク出力(最大180 N)に到達することが確認されました。これは、従来の空気圧式人工筋肉が持つ応答遅れ(数十〜100ミリ秒)を大きく凌駕し、生体筋肉の瞬発性に迫る応答特性であると評価できます(図4)。さらに、開発した空気圧回路を用いて1〜10 Hzの範囲で安定した繰り返し燃焼駆動を実現し、繰り返し動作においても構造の信頼性と実用性が確かめられました。
図3 実験装置
図4 等尺性収縮試験結果
2-2.温度測定による安全性の検証
HADECは燃焼を利用する新たなアクチュエータであるため、連続動作時の温度上昇による安全性が重要な検討課題となります。本研究では、人工筋肉内部に温度センサ(サーミスタ)を設置し、着火の頻度を変化させながら内部温度の変化を計測しました(図5)。その結果、1Hzおよび5Hzの点火周波数では、駆動から1分間以上が経過しても温度は緩やかにしか上昇せず、50℃程度に留まることが確認されました。このことから、低~中頻度での駆動においては温度上昇が小さく、冷却機構を必要とせず安定運用が可能であると考えられます。着火頻度の高い10Hzでは急激な温度上昇が見られ、約10秒で80℃°Cに達しました。これは、天然ゴム製のチューブの耐熱限界(約120℃)に近づく可能性があるため、高頻度での繰り返し駆動に際しては冷却措置や耐熱性の高い材料の採用が必要となることが示されました。一方で、温度上昇が80℃に達した後にシステムを停止し、15秒間の冷却時間を設けることで、再び常温(25℃)に戻り、正常に再起動できることも確認されました。これにより、適切なインターバルを設けることで、繰り返しの燃焼駆動においても安全な運用が可能であることが実証されました。
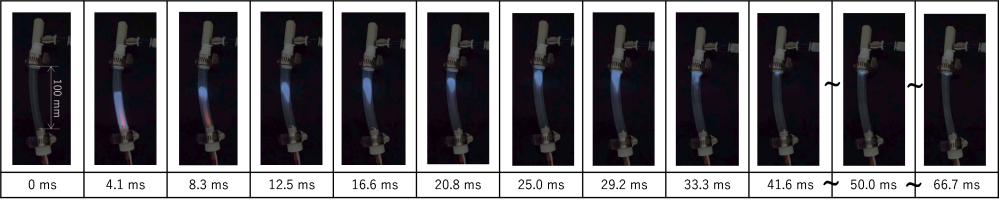
図5 透明なシリコンチューブを用いた火炎伝播の観察
3.今後の展開
現在は、より複雑な筋骨格構造を模したシステムへと発展させるために、複数のHADECを束ねた「筋束型アクチュエータ」の設計・製作に取り組んでいます。これにより、より実用的かつ生体模倣的なアクチュエーションが可能となり、福祉機器やロボット分野への応用が期待されます。今後は、動作周波数や混合ガスのモル比、供給圧力の違いが出力特性に及ぼす影響を詳細に評価し、制御性や耐久性を含めた性能の向上を図ります。これらの課題に取り組むことで、実世界における持続的かつ高応答な人工筋肉としての応用を目指します。
●この研究成果のもととなった研究経費(主管庁、配分機関等)、研究種目、課題番号、課題名など
本研究は、国立研究開発法人科学技術振興機構(JST)の若手研究者支援プログラム ACT-Xの支援を受けて実施されました(JPMJAX21K2)。
【論文情報】
| 雑誌名 | IEEE Robotics and Automation Letters |
| 論文名 | HADEC: High-Response Artificial Muscle Actuator using Dimethyl Ether Combustion |
| 著者 | 森 謙吾 (中央大学理工学研究科 修士課程1年) 鶴見 光哉 (中央大学理工学研究科 修士課程1年) 澤橋 龍之介(中央大学理工学研究科 特別研究員(DC2)) 圓城 竜斗(中央大学理工学研究科 修士課程修了生) 中村 太郎(中央大学理工学部 教授) 奥井 学(中央大学理工学部 准教授) |
| DOI | 10.1109/LRA.2025.3573177 |
【お問い合わせ先】
<研究に関すること>
奥井 学 (オクイ マナブ)
中央大学理工学部 准教授(精密機械工学科)
TEL: 03-3817-1841
E-mail: mokui147[アット]g.chuo-u.ac.jp
<広報に関すること>
中央大学 研究支援室
TEL: 03-3817-7423または1675 FAX: 03-3817-1677
E-mail: kkouhou-grp[アット]g.chuo-u.ac.jp
※[アット]を「@」に変換して送信してください。
【用語解説】
注1)ジメチルエーテル (dimethyl ether : DME)
DMEは、分子内に酸素を含む含酸素燃料で、常温では無色の気体。完全燃焼しやすく、燃焼時に黒煙や微粒子をほとんど排出しない。また、自然発火温度が350℃と低く、メタン(650℃)と比較して容易に燃焼を開始できることも特徴である。さらに、低圧で液化が可能であり、液体として軽量な容器内で保存・輸送できる利便性を持つことから、エアダスターなどの日用品にも利用されている。
