2024.01.31
News
Celestial Observation Rovers “LEV-1” Developed by Professor Yasuharu KUNII of Faculty of Science and Engineering Implement Lunar Activities – Unprecedented Achievement, Success in Direct Transmission with Earth from 380,000 km Away -

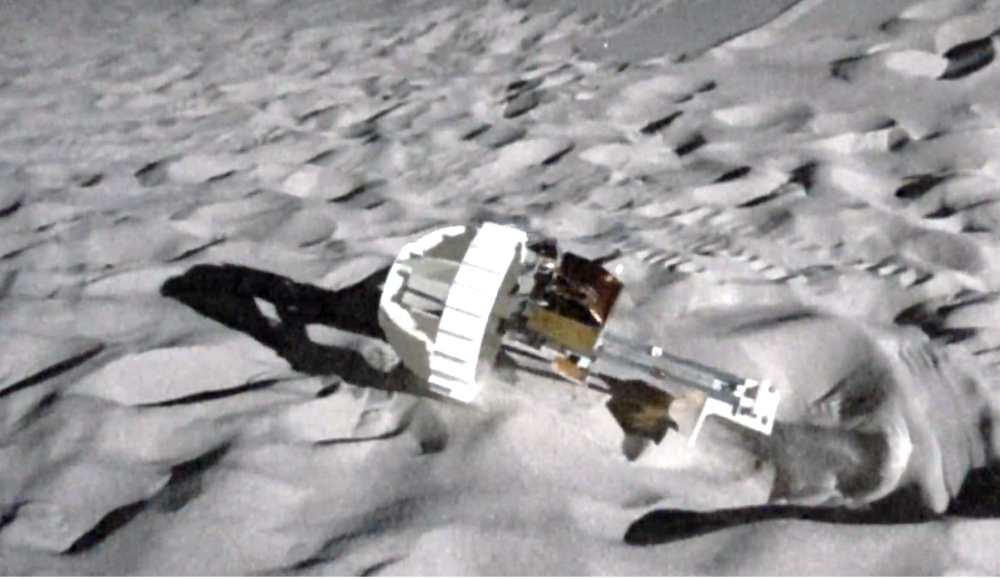
▲ Fig.1 Prototype when developing LEV-1, “Hopping Rover” (Captured under experimental environment on earth)
On January 20th, 2024, at 12:20 midnight (JST), a celestial observation rover "LEV-1" was separated and ejected just before the moon landing demonstration machine "Smart Lander for Investigating Moon (SLIM)" landed on the moon, and then the activity of "LEV-1" on the lunar surface was confirmed through analyzing the collected telemetry data*1.
“LEV-1” was jointly developed by the team of Chuo University (led by Professor Yasuharu Kunii of the Faculty of Science and Engineering), Japan Aerospace Exploration Agency (JAXA), and Tokyo University of Agriculture and Technology. This rover which weighs around 2kg is supposed to hop around autonomously to capture images of the lunar surface and “SLIM,” and directly transmit data to Earth.
According to telemetry data, “LEV-1” hopped around the lunar surface after being separated from “SLIM” and directly transmitted data (including data from “LEV-2,” a rover which was separated together) to the ground station as planned. “LEV-1” is now kept on standby on the moon as it is facing a power shortage due to being unable to acquire power through sunlight. The Earth has challenged to gain lunar images and to transmit data, however, the lunar images are yet to be confirmed. The Earth is expecting the power to be recharged allowing the rover to restart its activity if the direction the sunlight irradiates changes.
An image of SLIM and the surrounding environment which "LEV-2" captured and then forwarded to the Earth using "LEV-1" communication device is released on the JAXA press release (Rovers Successful in Taking Images of the Smart Lander for Investigating Moon (SLIM) and Transmitting Data (tentative translation), as of January 25th, 2024, Japanese, JST).
“LEV-1” achieved the world's smallest and the lightest observation rover in terms of being successful in directly transmitting data captured at approx. 380,000km away the lunar surface to the Earth. It also made history for realizing hopping around the moon's surface, communicating between two rovers on the moon, and its fully autonomous feature.
Professor Kunii is a project manager of the “Intelligent Multi Agents for Exploration and Settlement in Unknown and Unexplored Areas” of Cabinet Office’s Moonshot Research and Development Program Goal 3 “Realization of AI robots that autonomously learn, adapt to their environment, evolve in intelligence and act alongside human beings, by 2050.” The achievement of "LEV-1" will be leveraged in developing a robot to realize a lunar probe.
*1 telemetry data: Remote communication of measured data between cosmic observation device and the Earth.

The collaboration of two parent-child probes, celestial observation rover LEV-1 and LEV-2, has realized the lunar surface exploration. I am extremely happy that the parent probe “LEV-1” not only was successful in hopping around the moon surface 6 times directly transmitting with the Earth, but also communicated with the child probe to gain images of SLIM after the moon landing and transmitted its data to the Earth. More than 20 years have passed since we conceptualized a small sized robot which later called LEV-1, and launched the research and development of celestial observation technology. Finally, my dream has come true. I believe this achievement will be a milestone in the field of lunar observation by robots. I fully appreciate from my heart my buddy researchers who stood by me never giving up, and those who always supported and cheered us.
The technology of this achievement of “LEV” is handed down to our research and development project of Cabinet Office’s Moonshot Research and Development Program which we strive to realize the technology for the lunar surface observation conducted by multiple robot groups. However, the technology will not be limited to this, I am sure it will be passed down to various fields transcending the celestial observation area, so please look forward to the future that which LEV's offspring play an active role.
Furthermore, I hope I can work on research together with the youths who shared this historic moment someday.
Yasuharu Kunii
Know more about Professor Kunii’s research
