2024.01.23
News
Celestial Observation Rovers “LEV-1” and “LEV-2,” developed by Professor Yasuharu KUNII (Faculty of Science and Engineering) and others Start its Moon Investigation (From January 20th January, Midnight)
The moon landing demonstration machine “Smart lander for investigating Moon (SLIM),” which was launched toward the moon on September 7th, 2023, successfully landed on the lunar surface on January 20th, 2024, at 0:20 am (JST), becoming the first in Japan as well as the fifth country in the world to succeed in moon landing. Following this landing, the celestial observation rovers “LEV-1” and “LEV-2” onboard the SLIM started their operation.
“LEV-1” was jointly developed with the team led by Professor Yasuharu Kunii of the Faculty of Science and Engineering and Japan Aerospace Exploration Agency (JAXA) for the MoonShot Research & Development Program and was separated and ejected just before the SLIM landed on the moon.
“LEV-1” weighs around 2kg and can jump around the lunar surface autonomously. Its mission is to shoot and observe the lunar surface as well as to film the landing of the SLIM and directly transmit the data to the Earth.
In addition, “LEV-1” also relays the correspondence of observation and motivation data of the “LEV-2” (TAKARA TOMY and JAXA), another rover ejected from the SLIM.
According to the press conference held by JAXA, the communication between LEV-1 and Japan is confirmed.
For more details of the SLIM’s lunar surface landing, please visit the JAXA website.
“Moon Landing of the Smart Lander for Investigating Moon (SLIM)” December 5, 2023 (JST)
“The results of the Moon Landing by the Smart Lander for Investigating Moon (SLIM),” January 20, 2024 (JST)
Professor Kunii is promoting the Research and Development Projects of “Intelligent Multi Agents for Exploration and Settlement in Unknown and Unexplored Areas” with the issue facilitators with an eye on Moonshot Goal 3 “Realization of AI robots that autonomously learn, adapt to their environment, evolve in intelligence and act alongside human beings, by 2050” (Program Director Toshio Fukuda, Visiting Professor of the Institutes of Innovation for Future Society, Nagoya University).
Cabinet Office Moonshot Research and Development Program Goal 3 “Intelligent Multi Agents for Exploration and Settlement in Unknown and Unexplored Areas” Website
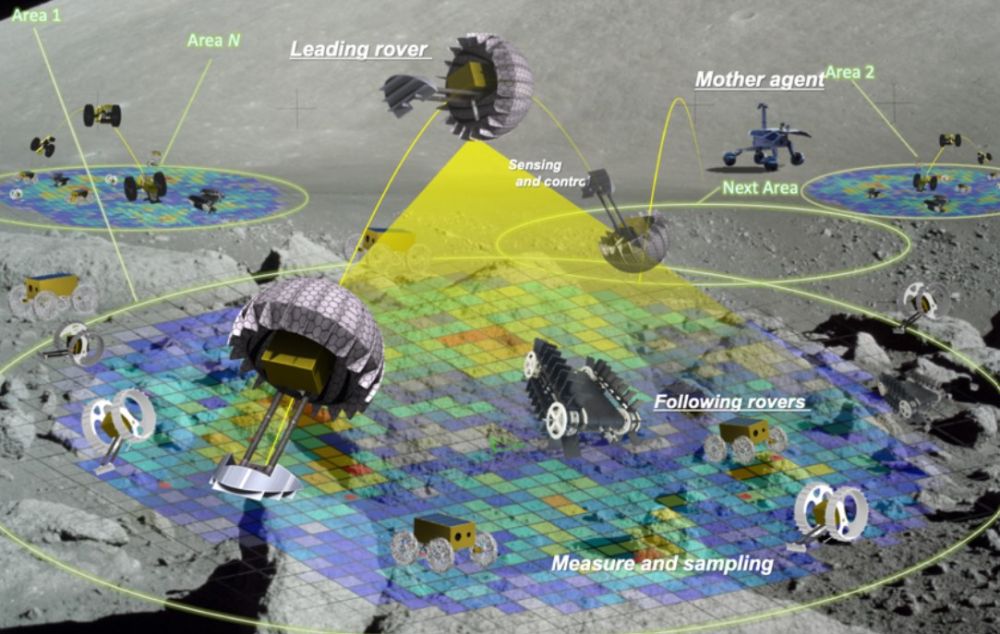
Regarding the “Intelligent Multi Agents for Exploration and Settlement in Unknown and Unexplored Areas” it is developing various robots which can put into practice for lunar investigation. One of such robots is a small sized robot, “RED” with jumping mechanism of LEV-1 transited.
