2024年1月20日午前0時20分(日本時間)、小型月着陸実証機「Smart Lander for
investigating Moon (SLIM)」が日本で初めて、世界で5カ国目の月面着陸に成功しました。また、SLIMに搭載され月に運ばれた天体観測機「LEV-1」「LEV-2」の運用が開始されました。
2024年1月19日深夜から20日早朝(日本時間)、小型月着陸実証機「Smart Lander for
investigating Moon (SLIM)」が月面に着陸する見込みです。また、SLIMに搭載され月に運ばれた天体観測機「LEV-1」「LEV-2」の運用開始も予定されています。
「LEV-1」は、ムーンショット國井プロジェクトの理工学部教授 國井康晴らが宇宙航空研究開発機構(JAXA)と共同で開発したもので、SLIMが月面に着陸する直前に分離・射出されました。
約2Kgの機体で月面をジャンプしながら自律的に移動し、月面の撮影・観測やSLIM着陸機の撮影に挑み、データを地球に直接送信するミッションを担っています。
また、同じくSLIMから射出された「LEV-2 」(タカラトミー、JAXA)の観測・動作データの通信を中継する役割も担います。
JAXAの記者会見によると、着陸後、「LEV-1」と日本との通信が確認されたとのことです。
SLIM月面着陸の詳細については、JAXA公式Webサイト「小型月着陸実証機(SLIM)の月面着陸の予定について」(2023年12月5日付)および小型月着陸実証機(SLIM)の月面着陸の結果について(2024年1月20日)をご覧ください。
===
國井教授は、ムーンショット目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」(プログラムディレクター(PD)福田 敏男(名古屋大学 未来社会創造機構客員教授))に向けて、課題推進者とともに研究開発プロジェクト「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」を推進しています。
國井教授の研究内容について興味をお持ちの方は、下記もご覧ください。
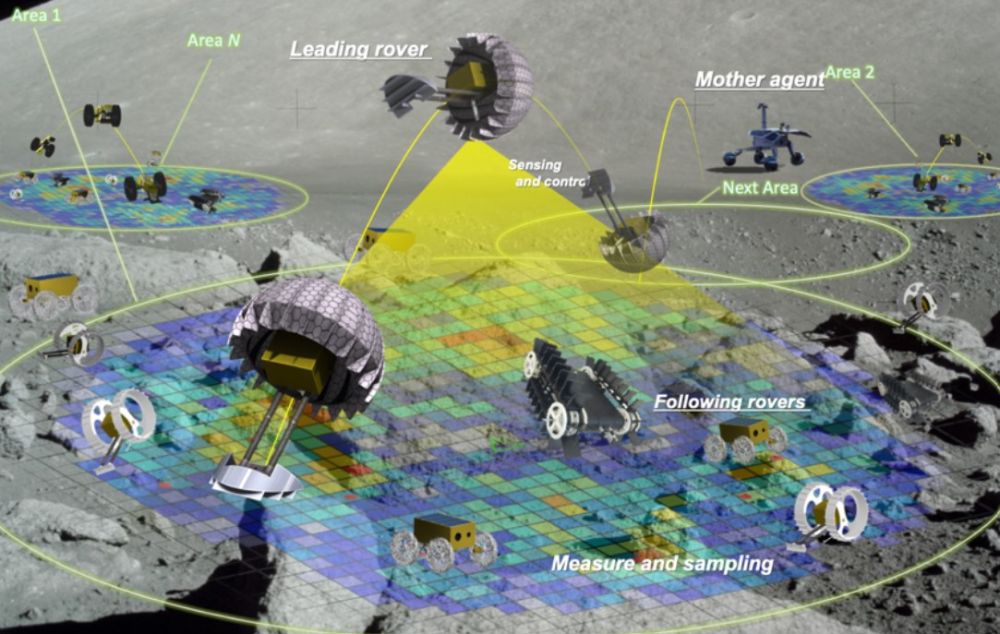
「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」では、「LEV-1」の大きな特徴である跳躍機構を引き継ぐ小型ロボット「RED」をはじめ、月面探査での実用に向けて、さまざまなロボットを開発中です。
