理工学部教授 國井康晴がプロジェクトマネージャーを務める、内閣府ムーンショット型研究開発制度 目標3研究開発プロジェクト「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」のメンバーの複数が参加していた、前身プロジェクトといえる超小型月面ローバ「LEV-1」が2024年度日本機械学会賞(技術)を受賞しました。
2024年度日本機械学会賞(技術)
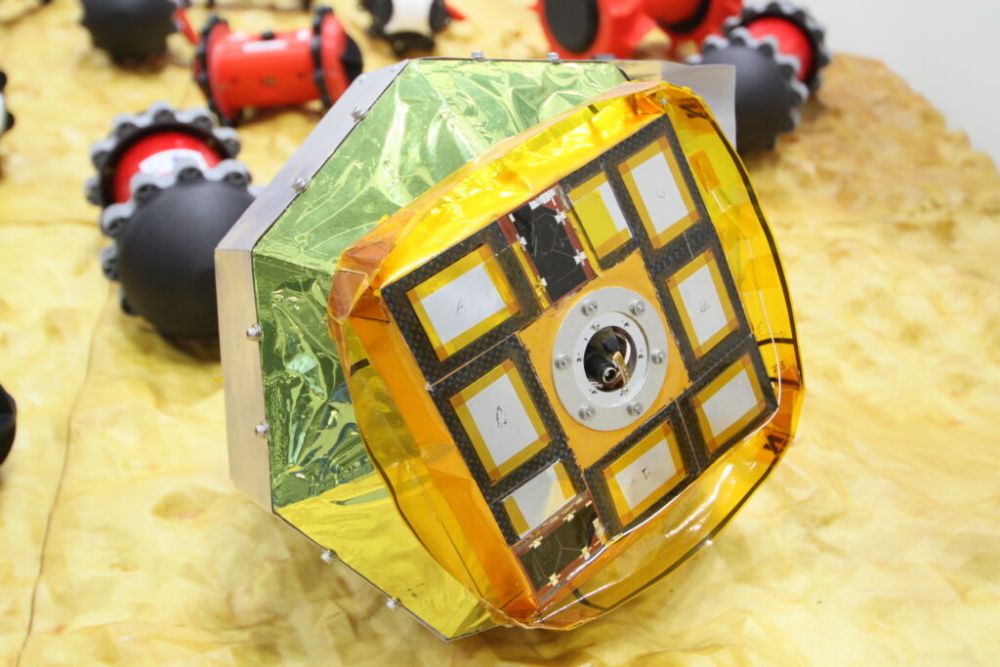
「完全自律制御と跳躍式移動を実現した超小型月面ローバ」
前田 孝雄(東京農工大学)
吉川 健人((国研)宇宙航空研究開発機構)
大槻 真嗣((国研)宇宙航空研究開発機構)
吉光 徹雄((国研)宇宙航空研究開発機構)
國井 康晴(中央大学)
詳細は、下記URLの2024年度日本機械学会賞の発表ページをご覧ください。
https://www.jsme.or.jp/20250314/
日本機械学会賞は1958年(昭和33年)に「日本の機械工学・工業の発展を奨励する」ことを目的として設けられた由緒ある賞です。本受賞は2025年3月14日(金)に発表され、贈賞式は同年4月24日(木)に東京都港区で開催されます。
國井教授の研究内容について興味をお持ちの方は、下記もご覧ください。
