中央大学の理工学部・國井康晴教授の研究チームは、国立研究開発法人宇宙航空研究開発機構(JAXA)宇宙科学研究所、東京農工大学、およびオーストラリア連邦科学産業研究機構(CSIRO)と共同で、小型ロボット群を用いた知的協調探査のフィールド試験を実施しました。
この実験では、日本とオーストラリアの太陽系探査に関する国際協力の1つとして、2025年11月17日から20日にかけて、オーストラリア北東部クイーンズランド州のチラゴー・マンガナ洞窟群国立公園(Chillagoe-Mungana Caves National Park)に多数存在する天然洞窟の一つを利用しました。
月や火星の表面には垂直に切り立った「縦孔(たてあな)」が数多く見つかっており、その先には横方向に広がる地下洞窟「溶岩チューブ」の存在が示唆されています。地下洞窟は宇宙からの放射線が遮断される、温度が安定しているなどの理由により、将来の居住地、発電所、データセンタなどの人類の活動拠点として有望視されています(図1)。
しかし、地下洞窟は外部からの事前の観測が不可能で、暗黒かつ通信困難な未知の「危険領域(極限環境)」です。従来のロボットでは全損を恐れるあまり近づくのが難しいため、我々研究グループでは、内閣府ムーンショット型研究開発事業の研究開発の一環として、このような極限環境で使うことのできる複数の小型ロボットを用いた新しい知的・協調探査の研究開発を行っています。
小型ロボットは輸送コストを抑制できるだけでなく、ロボット数の増減による規模調整や、一部の故障が全体に及ぼさないリスク分散が容易であるという利点があります。また群れることで、広い面積を同時かつ効率的に探査・観測できます。我々は、小惑星探査機「はやぶさ」「はやぶさ2」のMINERVAシリーズや、SLIMのLEVといった探査機で培われた小型ロボットの技術を継承し、質量1kg程度のロボットを複数用いることで次世代の探査方式として確立することを目指しています。
この研究活動を進める上で、月面に存在が示唆されている地下洞窟と同様の規模の地球上に存在する地下洞窟でロボットの動作実験を行うことは悲願でした。今回、CSIROが積極的な支援を行い、オーストラリア国内での実験場を確保することができました。
実験内容は2つあります。1つは実際の自然洞窟における群ロボットの動作試験です。日本から空輸した約10機の小型ロボットを用いて、洞窟内の多様な環境を走行・探査させました。これらのロボットは、個々が他者を気にせずに確率的な自律行動をしつつも、全体としては一団として行動するのが特徴です。多数のロボットにより広範囲な探査を行い、人が這いつくばってやっと通れるほどの狭い空間にも侵入し奥まで行って戻って来ました。このような探査は従来の大型ロボットでは不可能なことです。ロボットの位置と地形はCSIROが有するSLAM技術を用いてリアルタイム計測しました。
もう1つの実験は、ロボット間通信に使用する電波が洞窟内の複雑な地形を伝播する時の影響を計測することです。このロボット群では、超広帯域通信(Ultra Wide Band)と呼ばれる技術を使用し、ロボット同士や外部のシステムやオペレータとの間で無線通信・距離測定をします。この電波が洞窟内という閉鎖空間でどのような伝わり方をするかを精密に計測・記録しました。これらの計測が将来の月面洞窟内で使用する通信機の開発に役立ちます。
今回の実験で得られた知見およびデータは、研究を進める上で、ロボット機能改良や課題解決に直結する貴重な成果です。これらを活用し、未知の危険領域(極限環境)に挑む協調探査ロボットの研究開発をさらに加速させていきます。

図1: 月面地下洞窟におけるロボット群による活動拠点開拓(イメージ図) Credit: 中央大学

2: ロボット動作実験の様子 Credit: 中央大学
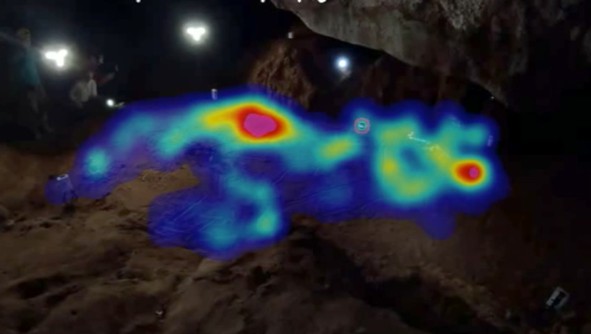
図3: ロボットが移動した部分に色付した群探査の結果。青・黄色・赤色と探査回数増加 Credit: 中央大学

図4: 移動探査中のロボットたち。赤く光るライトは人が確認するためでロボットでは不使用 Credit: 中央大学

図5: ロボットの位置計測 Credit: 中央大学
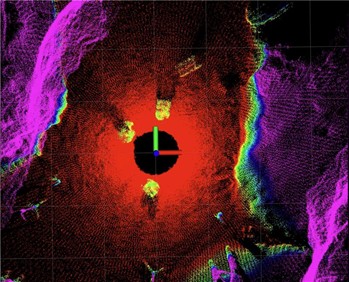
図6: ロボットの位置 Credit: CSIRO, Milad Ramezani

図7: 電波伝播計測の様子。手前が計測側、奥が送信側 Credit: CSIRO, Milad Ramezani

図8: 日豪共同研究チーム集合写真、天井に穴がある空間にて Credit: CSIRO, Katrina Lo Surdo
<Link>
月の地下に巨大な空洞を確認
https://www.isas.jaxa.jp/topics/001156.html
過酷な月の宇宙放射線被ばく線量を縦孔利用で月表面の10%以下に
https://www.isas.jaxa.jp/topics/002455.html
ムーンショット型研究開発事業が目指すAI・ロボット群による月溶岩チューブ探査と月面未来都市
https://www.isas.jaxa.jp/feature/forefront/241127.html
CSIRO
https://www.csiro.au/en/
國井教授がプロジェクト・マネージャーを務めるJST ムーンショット型研究開発事業についてや、研究室で取り組む研究内容について興味をお持ちの方は、下記もご覧ください。
JSTムーンショット型研究開発事業 目標3の研究開発プロジェクト「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」Webサイト
